|
Självgående skogsmaskin
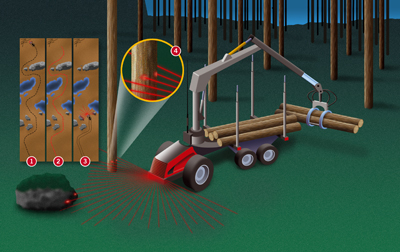
Umeå Universitet driver ett projekt för utveckling av tekniker för en självgående skogsmaskin. Tanken är att den ska transportera timmer från avverkningsplatsen i skogen till en omlastningsplats där lastbil tar över.
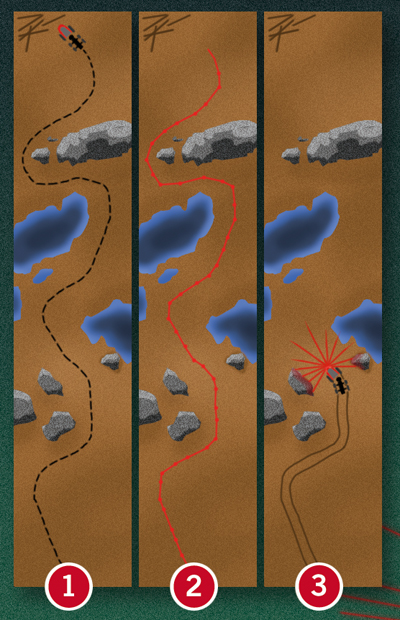
1. En van förare kör sträckan först ...
2. ... och maskinen lär sig färdvägen samt förarens styrkommandon och gaspådrag.
3. Därefter kör datorn maskinen enligt den angivna banan med hjälp av dels GPS, dels de uppmätta hjulrörelserna och dels med en laserscanner som likt en radar kontinuerligt söker av maskinens närmiljö.
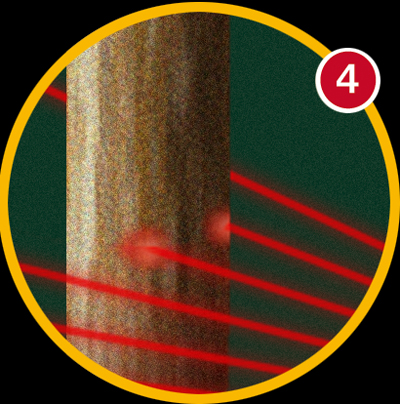
4. Laserscannern kan även detektera möjliga hinder i dess väg. Om något skulle blockera vägen kan maskinen antingen manövrera runt hindret eller stanna och begära instruktioner från operatören vid avverkningsplatsen.
En förarlös maskin kan bl a göras flera ton lättare då den inte behöver en förstärkt förarhytt. En lättare maskin ger mindre markskador och mindre avgaser.
Underlag:
Telefonintervju med kontaktpersonen på företaget.
Verktyg: Illustrator för att definiera konturlinjerna, därefter flyttades arbetet över till Photoshop för färgläggning, struktur och skuggor.
Klicka
på någon av bilderna för att återgå
|